**_Notes for Amazing Animation Paper_**
](zelda.webp width=400 border=1)
This website is a personal interest-driven academic research record website for computer graphics and robotics, especially in simulation fields.
I will record some interesting or inspiring articles or academic achievements here.
Each article is divided into six layers, including abstract, preliminary knowledge, main equation, main contribution, conclusion, and future ideas to introduce and document.
If you have any relevant articles that you're interested in sharing with me or discussing with me, please feel free to contact me.
# Graphics Paper
Papers below are selected by SIGGRAPH, SIGGRAPH ASIA, PG, EG, SCA, MIG and so on.
## Fluid Simulation
[Position-based Surface Tension Flow](./siggraph/fluid/pbd-st.html), _Jingrui Xing*, Liangwang Ruan* , Bin Wang, Bo Zhu, Baoquan Chen_, SIGGRAPH Asia 2022
Construct surface tension flow as PBD constraints.
: 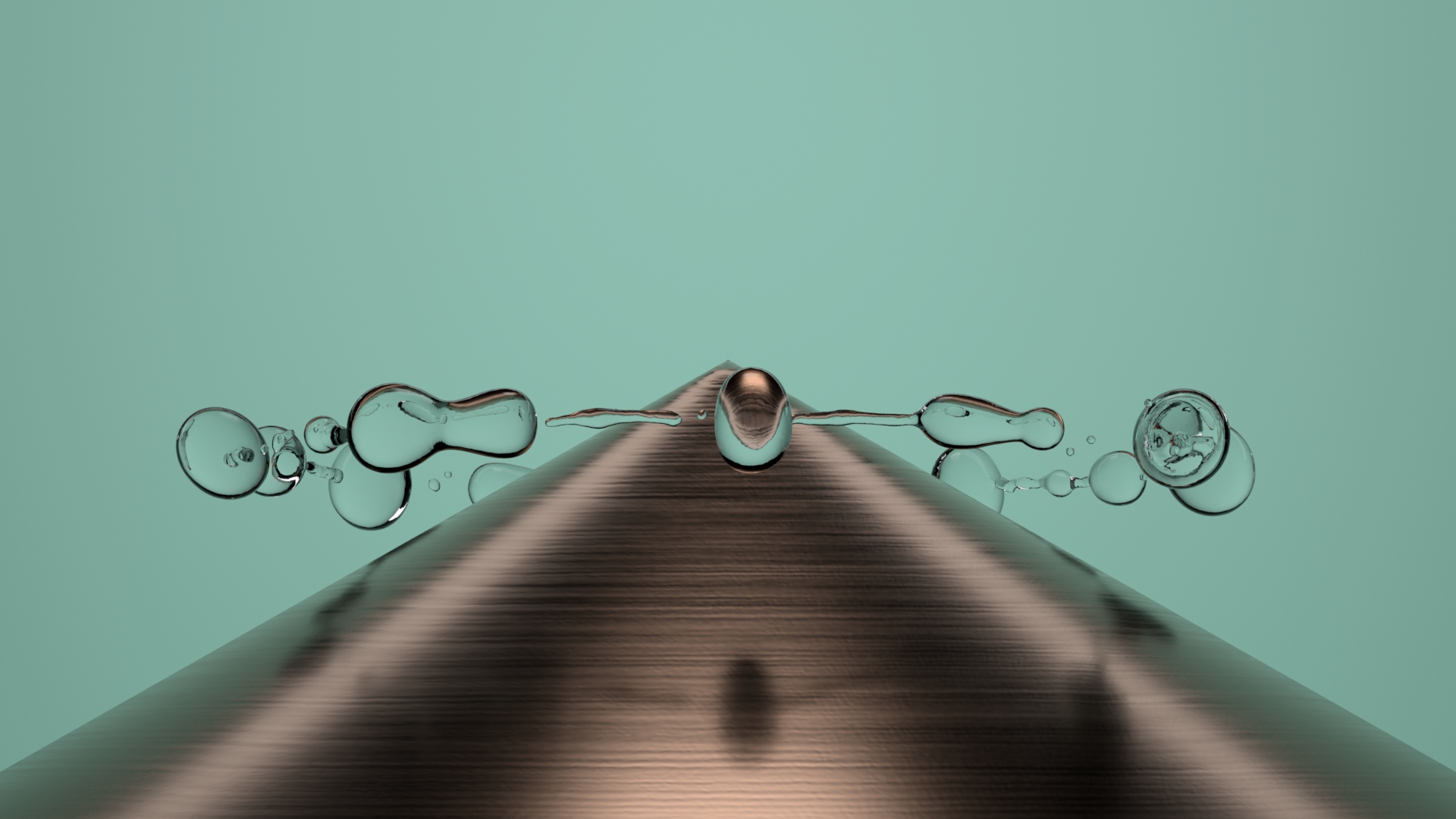 [Solid-Fluid Interaction with Surface-Tension-Dominant Contact](./siggraph/fluid/solid-st.html), _Liangwang Ruan* , Jinyuan Liu*, Bo Zhu, Shinjiro Sueda, Bin Wang, Baoquan Chen_, SIGGRAPH 2021
[Solid-Fluid Interaction with Surface-Tension-Dominant Contact](./siggraph/fluid/solid-st.html), _Liangwang Ruan* , Jinyuan Liu*, Bo Zhu, Shinjiro Sueda, Bin Wang, Baoquan Chen_, SIGGRAPH 2021
I'd classify this paper as related to fluid simulation despite its loose coupling.
:  [A Monte Carlo Method for Fluid Simulation](./siggraph/fluid/mcfluid.html), _Damien Rioux-Lavoie*, Ryusuke Sugimoto*, Tümay Özdemir, Naoharu H. Shimada, Christopher Batty, Derek Nowrouzezahrai, Toshiya Hachisuka_, SIGGRAPH Asia 2022
[A Monte Carlo Method for Fluid Simulation](./siggraph/fluid/mcfluid.html), _Damien Rioux-Lavoie*, Ryusuke Sugimoto*, Tümay Özdemir, Naoharu H. Shimada, Christopher Batty, Derek Nowrouzezahrai, Toshiya Hachisuka_, SIGGRAPH Asia 2022
Combine rendering method with simulation, maybe a useful tool to construct diff-fluid.
:  [Position Based Fluid](./siggraph/fluid/pbf2013.html), _Miles Macklin, Matthias Müller_, SIGGRAPH 2013
[Position Based Fluid](./siggraph/fluid/pbf2013.html), _Miles Macklin, Matthias Müller_, SIGGRAPH 2013
Use PBD method simulate fluid.
:  ## Cloth Simulation
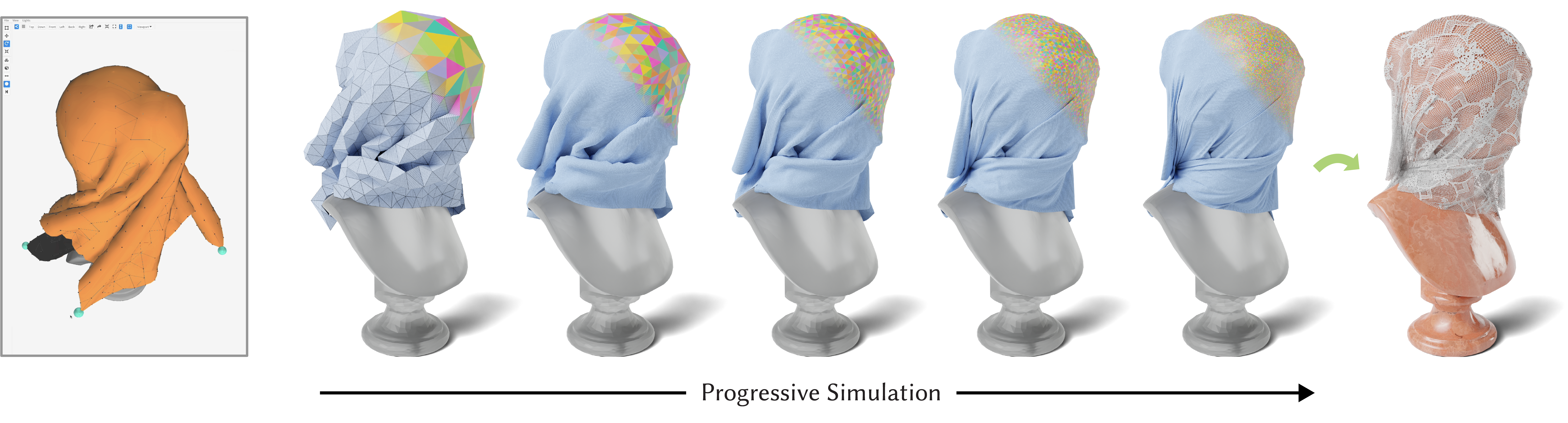
[Progressive Simulation for Cloth Quasistatics](./siggraph/cloth/pcs-sim.html), _Jiayi Eris Zhang, Jérémie Dumas, Yun (Raymond) Fei, Alec Jacobson, Doug L. James, Danny M. Kaufman_, SIGGRAPH Asia 2022
## Cloth Simulation
[Progressive Simulation for Cloth Quasistatics](./siggraph/cloth/pcs-sim.html), _Jiayi Eris Zhang, Jérémie Dumas, Yun (Raymond) Fei, Alec Jacobson, Doug L. James, Danny M. Kaufman_, SIGGRAPH Asia 2022
Interesting for solving dynamics cloth with ipc.
:  [A GPU-based multilevel additive schwarz preconditioner for cloth and deformable body simulation](./siggraph/cloth/AGM-2022.html), _Botao Wu, Zhendong Wang and Huamin Wang_, SIGGRAPH 2022
[A GPU-based multilevel additive schwarz preconditioner for cloth and deformable body simulation](./siggraph/cloth/AGM-2022.html), _Botao Wu, Zhendong Wang and Huamin Wang_, SIGGRAPH 2022
Useful preconditioner for Iterative algorithm(CG, GS) easier parallel on GPU.
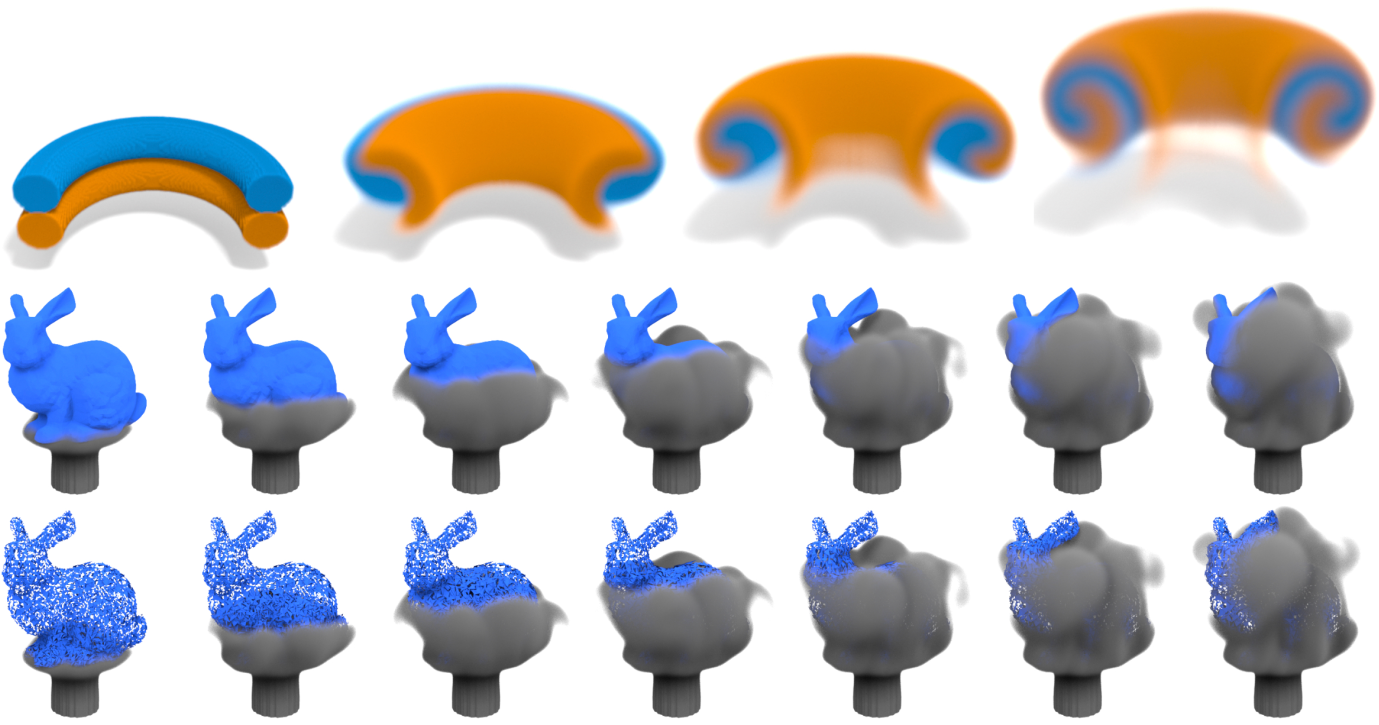
:  [A Material Point Method for Thin Shells with Frictional Contact](./siggraph/cloth/mpm-cloth.html), _Qi Guo, Xuchen Han, Chuyuan Fu, Theodore Gast, Rasmus Tamstorf, Joseph Teran_, SIGGRAPH 2018
[A Material Point Method for Thin Shells with Frictional Contact](./siggraph/cloth/mpm-cloth.html), _Qi Guo, Xuchen Han, Chuyuan Fu, Theodore Gast, Rasmus Tamstorf, Joseph Teran_, SIGGRAPH 2018
Add bending in origin mpm cloth paper.
:  ## Rigid-body Simulation
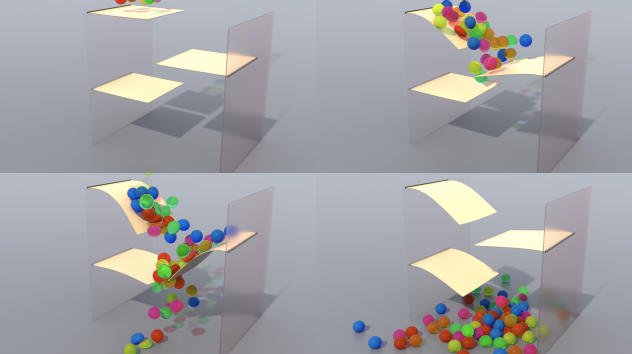
[Detailed Rigid Body Simulation with Extended Position Based Dynamics](./siggraph/rigid/PBDbody.html), _Matthias Müller, Miles Macklin, Nuttapong Chentanez, Stefan Jeschke, Tae-Yong Kim_, SCA 2020
## Rigid-body Simulation
[Detailed Rigid Body Simulation with Extended Position Based Dynamics](./siggraph/rigid/PBDbody.html), _Matthias Müller, Miles Macklin, Nuttapong Chentanez, Stefan Jeschke, Tae-Yong Kim_, SCA 2020
PBD with articulated rigid bodies.
:  ## Coupling Work
[ElastoMonolith: A Monolithic Optimization-based Liquid Solver for Contact-Aware Elastic-Solid Coupling](./siggraph/coupling/elastomonolith.html), _Tetsuya Takahashi and Christopher Batty_, SIGGRAPH Asia 2022
## Coupling Work
[ElastoMonolith: A Monolithic Optimization-based Liquid Solver for Contact-Aware Elastic-Solid Coupling](./siggraph/coupling/elastomonolith.html), _Tetsuya Takahashi and Christopher Batty_, SIGGRAPH Asia 2022
Coupling fluid, solid and elastic objects in a unified framework.
:  [A Multi-Scale Model for Simulating Liquid-Fabric Interactions](./siggraph/coupling/libwetcloth.html), _Yun (Raymond) Fei, Christopher Batty, Eitan Grinspun and Changxi Zheng_, SIGGRAPH 2018
[A Multi-Scale Model for Simulating Liquid-Fabric Interactions](./siggraph/coupling/libwetcloth.html), _Yun (Raymond) Fei, Christopher Batty, Eitan Grinspun and Changxi Zheng_, SIGGRAPH 2018
Coupling fluid with fabric.
:  ## Differentiable Simulator
[Fluidic Topology Optimization with an Anisotropic Mixture Model](./siggraph/diff/anisotropicstokes.html), _Yifei Li, Tao Du, Sangeetha Grama Srinivasan, Kui Wu, Bo Zhu, Eftychios Sifakis, Wojciech Matusik_, SIGGRAPH Asia 2022
## Differentiable Simulator
[Fluidic Topology Optimization with an Anisotropic Mixture Model](./siggraph/diff/anisotropicstokes.html), _Yifei Li, Tao Du, Sangeetha Grama Srinivasan, Kui Wu, Bo Zhu, Eftychios Sifakis, Wojciech Matusik_, SIGGRAPH Asia 2022
Differentiable simulator for fluid and solid topology optimization.
:  # Robotics Paper
Papers below are selected by RSS, ICRA, IROS, CORL, ICLR, ICML and so on.
## Differentiable Robots
[Dojo: A Differentiable Physics Engine for Robotics](./robotics/diff/dojo.html), _Taylor A. Howell, Simon Le Cleac'h, Jan Brüdigam, J. Zico Kolter, Mac Schwager, Zachary Manchester_, Arxiv Print
# Robotics Paper
Papers below are selected by RSS, ICRA, IROS, CORL, ICLR, ICML and so on.
## Differentiable Robots
[Dojo: A Differentiable Physics Engine for Robotics](./robotics/diff/dojo.html), _Taylor A. Howell, Simon Le Cleac'h, Jan Brüdigam, J. Zico Kolter, Mac Schwager, Zachary Manchester_, Arxiv Print
Differentiable simulator for robotics.
:  [Fast and Feature-Complete Differentiable Physics for Articulated Rigid Bodies with Contact](./robotics/diff/nimble.html), _Keenon Werling, Dalton Omens, Jeongseok Lee, Ioannis Exarchos, C. Karen Liu_, RSS 2021
[Fast and Feature-Complete Differentiable Physics for Articulated Rigid Bodies with Contact](./robotics/diff/nimble.html), _Keenon Werling, Dalton Omens, Jeongseok Lee, Ioannis Exarchos, C. Karen Liu_, RSS 2021
Differentiable simulator for robotics.
:  # Interesting Open-Source Software
[Hobak - A Library for Squashing Things](./software/hobak.html), _Theodore Kim, David Eberle_, SIGGRAPH 2022 Course Code
# Interesting Open-Source Software
[Hobak - A Library for Squashing Things](./software/hobak.html), _Theodore Kim, David Eberle_, SIGGRAPH 2022 Course Code
Amazing FEM code demo.
:  Contact
===================================================================
This site is managed by [Siyuan Luo](https://siyuanluo.com),
You can reach me by luosiyuan2002@gmail.com or via [Twitter](https://twitter.com/_Siyuan_Luo), or look me up on my Web.
Contact
===================================================================
This site is managed by [Siyuan Luo](https://siyuanluo.com),
You can reach me by luosiyuan2002@gmail.com or via [Twitter](https://twitter.com/_Siyuan_Luo), or look me up on my Web.
Visitor Tracker

